TACAN was put into operational use in the late 1960s and is a non-autonomous radionavigation system of near-navigation. It is the military system, which is used by NATO members. (The Czech air force doesn’t not operate this system and probably will not in the future, even there are concrete sites for mobile versions).
TACAN beacons are located on ground stations, but also can be located on air refueling tankers or can be deployed in a mobile variant. TACAN will remain one of the backbone navigation systems for NATO members until it is fully replaced by satellite navigation systems.
In principle of the function TACAN is a phase-impulse device which consists of a ground radio beacon and a TACAN on-board interrogator/device. Alternative system with a same functional principle used in civil sector is named VOR/DME or VORTAC.
Use
As mentioned above, it is mainly a military navigation system, but can be used also in the civil sector as well - as a combined VORTAC system.
Functional principle
TACAN combines the principles of two radio navigation systems, VOR and DME, and provides the following navigation variables:
slant range
azimuth/bearing of beacon
azimuth/bearing of plane
deviation from the set azimuth/bearing
position measured in polar coordinates
The principle of measuring slant range
The principle of measuring the slant range is the same as the principle of measuring slant range at DME. Even technical implementation is usually the same. Learn more about the DME principle here.
Azimuth measurement principle
As mentioned above, the TACAN uses the same azimuth/bearing principle as the VOR system, although there are some different technical specifications (for example, TACAN is working in the UHF band on the DME frequency). More about how VOR works can be found here.
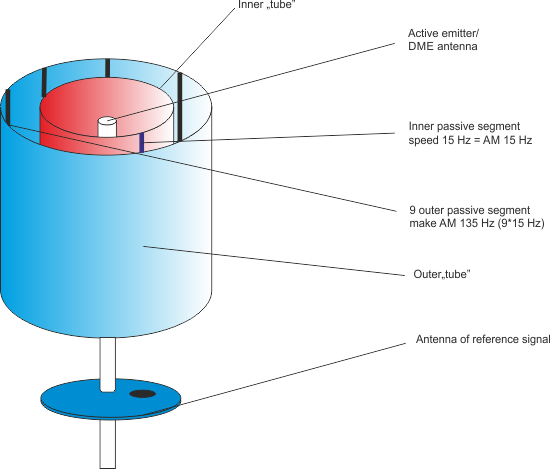
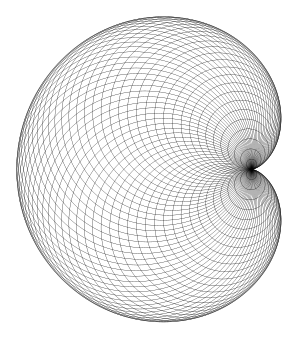
Information about the azimuth is formed from DME response pulses which are modulated with amplitude modulation into shape of cardioid.
The central emitter sends a constant combination of responses to the DME and squitter (about 2700 dots/s). Even it emit pulses and not constant wave, this fact does not affect the resulting AM signal because of high repetition frequency.
In a distance of 7,5cm from central emitter is an inner cylinder with one rotating passive element - a reflector which rotates at speed of 900 RPM (15 Hz). That reflector modulates the transmitted signal from antenna to AM 15 Hz. The modulated signal has the shape of a cardioid.
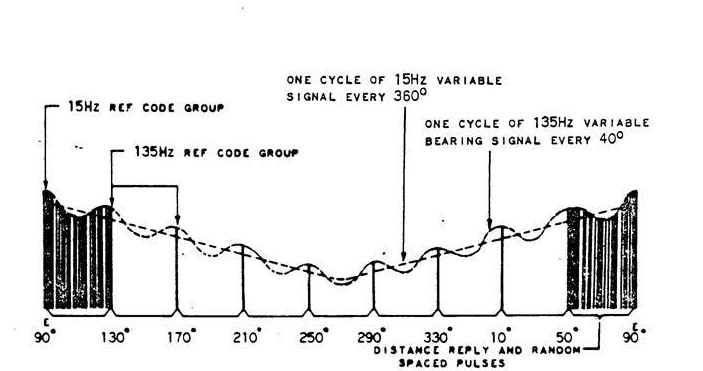
When rotating passive element intersects "East", the reference central antenna/emitter sends the reference signal named "North" in the form of 12 double-pulses.
The on-board receiver then evaluates the phase difference between the reference and the variable signal as well as at VOR. Here the function principle could end, but TACAN has added precise "channel".
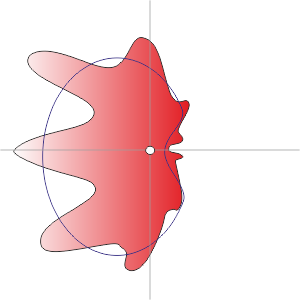
An outer cylinder is added, which is mechanically connected to the inner cylinder and which is in 45cm distance from the central emitter and where rotate 9 passive elements, which are shifted by 40 °. These 9 passive elements "smash" the signal for AM 135 Hz (9 radiators at 15 Hz).
Every 40 °, the central reference/emitter sends a reference signal in the form of 6 two-pulses.
Again, the reference and variable signal phases are compared. It is clear that the 135 Hz measurement is ambiguous and is therefore evaluated only after a 15 Hz signal has been evaluated. The 135 Hz signal specifies the measurement at 15 Hz.
Here is a picture with the TACAN signal spectrum.
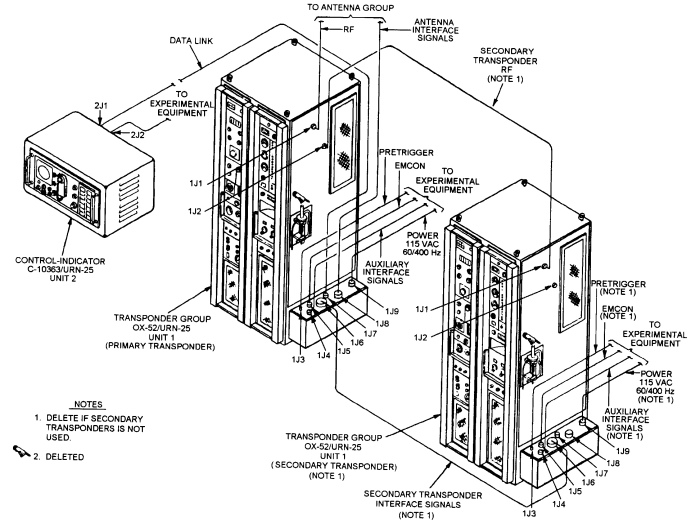
Antenna unit
The antenna unit is shown in the figure above, but the truth is that kind of mechanical antenna is currently replaced by an electronically beam swept antenna.
 Here is a picture with the TACAN signal spectrum.
Here is a picture with the TACAN signal spectrum.